- 深圳市159****8681 最新3D打印订单:¥499.51元
- 沈阳市186****4040 最新3D打印订单:¥814.80元
- 台中092****2653 最新3D打印订单:¥1,317.00元
- 深圳市138****2618 最新3D打印订单:¥637.56元
- 南京138****5228 最新3D打印订单:¥1,926.63元
- 深圳市138****2618 最新3D打印订单:¥517.94元
- 广州市135****6016 最新3D打印订单:¥647.24元
- 长春市136****7431 最新3D打印订单:¥680.49元
- 深圳市135****3766 最新3D打印订单:¥529.64元
- 深圳市138****2360 最新3D打印订单:¥622.98元
- 西安市134****8811 最新3D打印订单:¥749.36元
- 郑州市183****0928 最新CNC机加工订单:¥22,500.00元
- 上海市182****9903 最新3D打印订单:¥12,480.00元
- 济南市156****0318 最新钣金加工订单:¥6,045.50元
- 东莞市157****3032 最新钣金加工订单:¥2,200.00元
- 苏州市158****5151 最新CNC机加工订单:¥2,200.00元
- 上海198****1239 最新CNC机加工订单:¥22,500.00元
- 嘉兴市139****6874 最新CNC机加工订单:¥4,200.00元
- 安阿伯734****5963 最新CNC机加工订单:¥18,208.37元
- 上海市131****2750 最新CNC机加工订单:¥2,900.00元
- 深圳市178****8941 最新CNC机加工订单:¥3,000.00元
- 深圳市132****4471 最新CNC机加工订单:¥5,800.00元
- 苏州市139****1569 最新CNC机加工订单:¥10,030.00元
- 西安市152****3446 最新CNC机加工订单:¥2,100.00元
- 杭州市150****6228 最新CNC机加工订单:¥880.00元
- 深圳市166****2047 最新3D打印订单:¥5,500.00元
- 新界635****4728 最新CNC机加工订单:¥17,500.00元
- 杭州市159****6812 最新CNC机加工订单:¥960.00元
- 嘉兴市152****6816 最新3D打印订单:¥16,700.00元
- 成都市173****6014 最新CNC机加工订单:¥5,311.00元
机器人:我也有一双灵活的双手了
来源:e键打印
发布:2015-06-04
浏览次数:
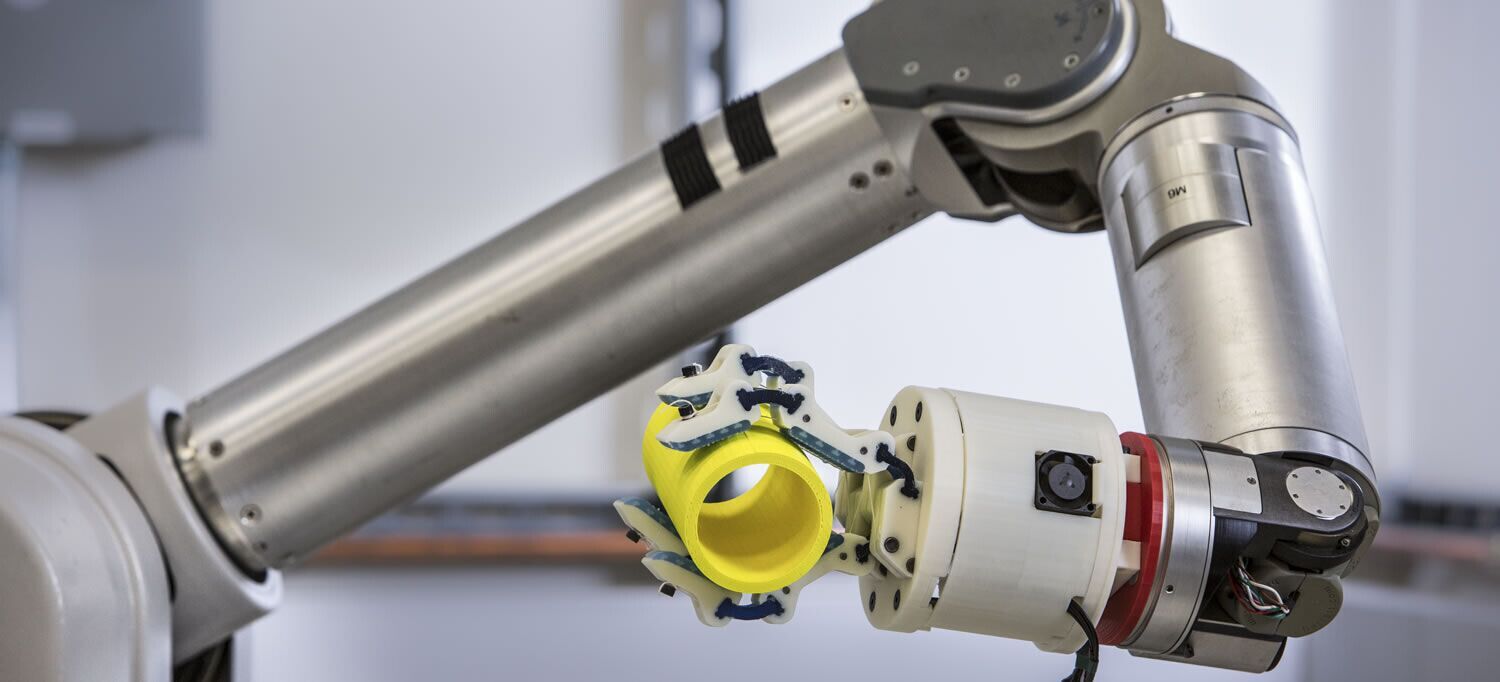
最近,耶鲁大学的研究人员开发出一款3D打印的机器人末端执行器(机械手)。该执行器造价低廉、功能强大,并可大大提高机器人的“手”的灵活性。重要的是采用了开源设计,堪为个人爱好者的绝佳选择。
使用3D打印机制作小型机器人已逐渐流行。但无论是个人爱好者还是商用机器人开发公司,如何让机器人的“手”(末端执行器)像人手那样活动都是个不小的难题。尽管研究人员想出了不少解决方案,但这些方案既昂贵又很难使用到其他装置,且几乎不可能被定制。
最近,为解决这一难题,耶鲁大学机械工程教授Aaron Dollar领导的Openhand项目组提出了卓有成效的3D打印解决方案。该团队开发的“手”成本低廉,且非常实用,能轻松捡起平躺在桌子上的硬币。尤为关键的是,它是开源的。
研究人员希望有更多的人使用这种开源的机器人“手”,借此使机器人设计出现有机转变,“这个项目打算打造一系列开源手的设计,并通过开源用户群体的贡献,产生大量有用的设计修改和变化提供给研究人员。因此,这个项目开发的手,设计必须简约、坚固耐用,尤其要适合反复迭代和在非结构化环境中运行。”

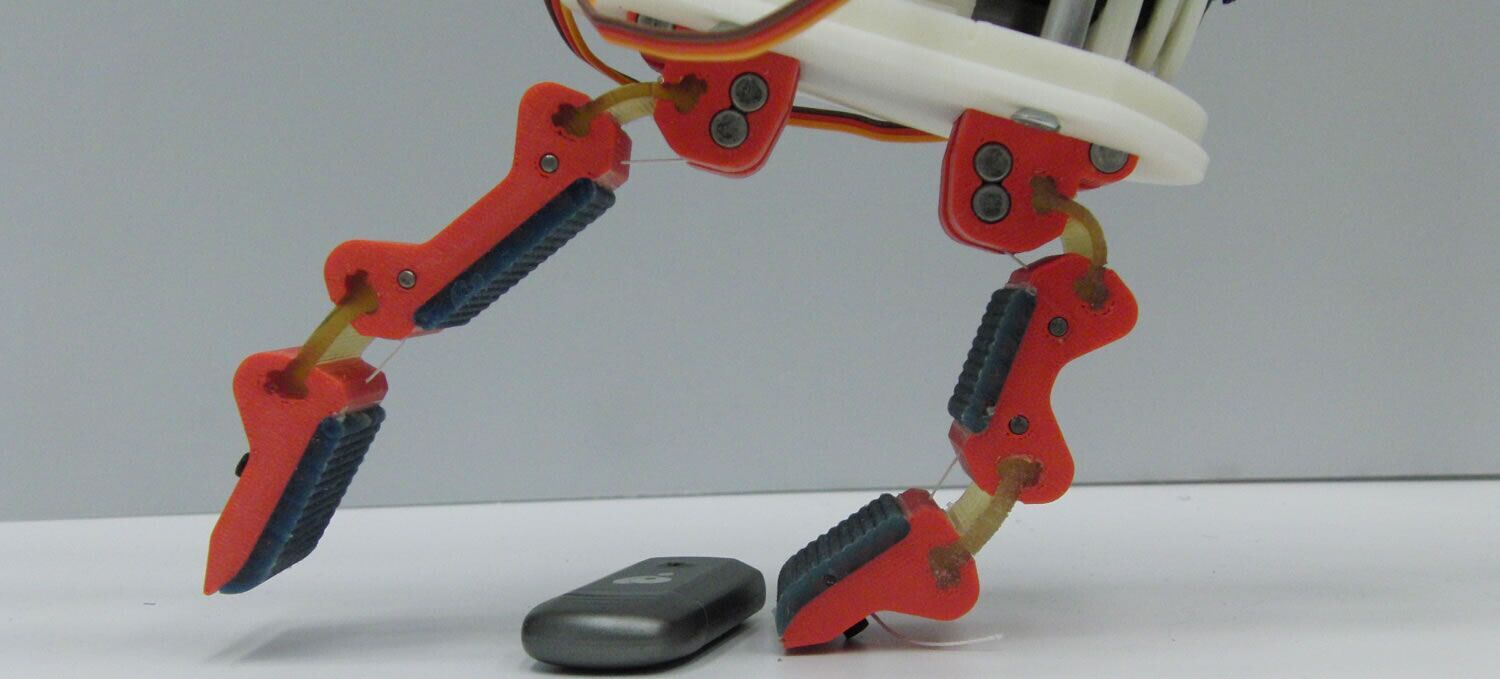
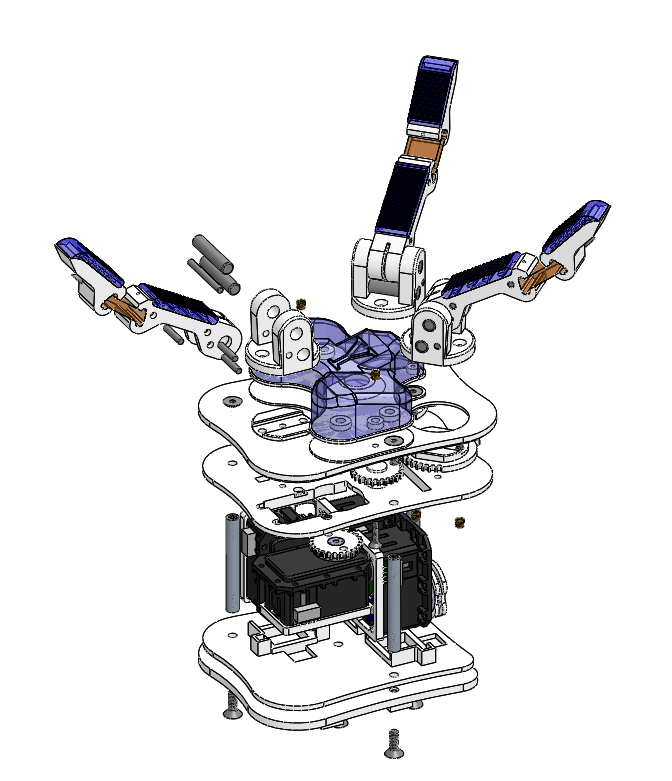
为真正做到如手使指,研究人员设计了一种转盘式柔绳传动(tendon-driven)的欠驱动手指。研究人员称这种欠驱动(underactuated)手能够根据接触物体的表面进行自适应调整,实现简单的抓握,而无需传感器或复杂的反馈系统。“这个设计范例将致动和手指元素分离开来,从而能够实现更大程度的定制。”
创客联盟了解到,Aaron Dollar的团队仅仅使用3D打印、树脂浇铸以及一些手工制作就完成了这一项目。他们使用3D打印机制造树脂模具和塑料手指,前者使用树脂浇铸成型,再进行固化和切割,这样就做出了机械手的“肌腱”和指垫。
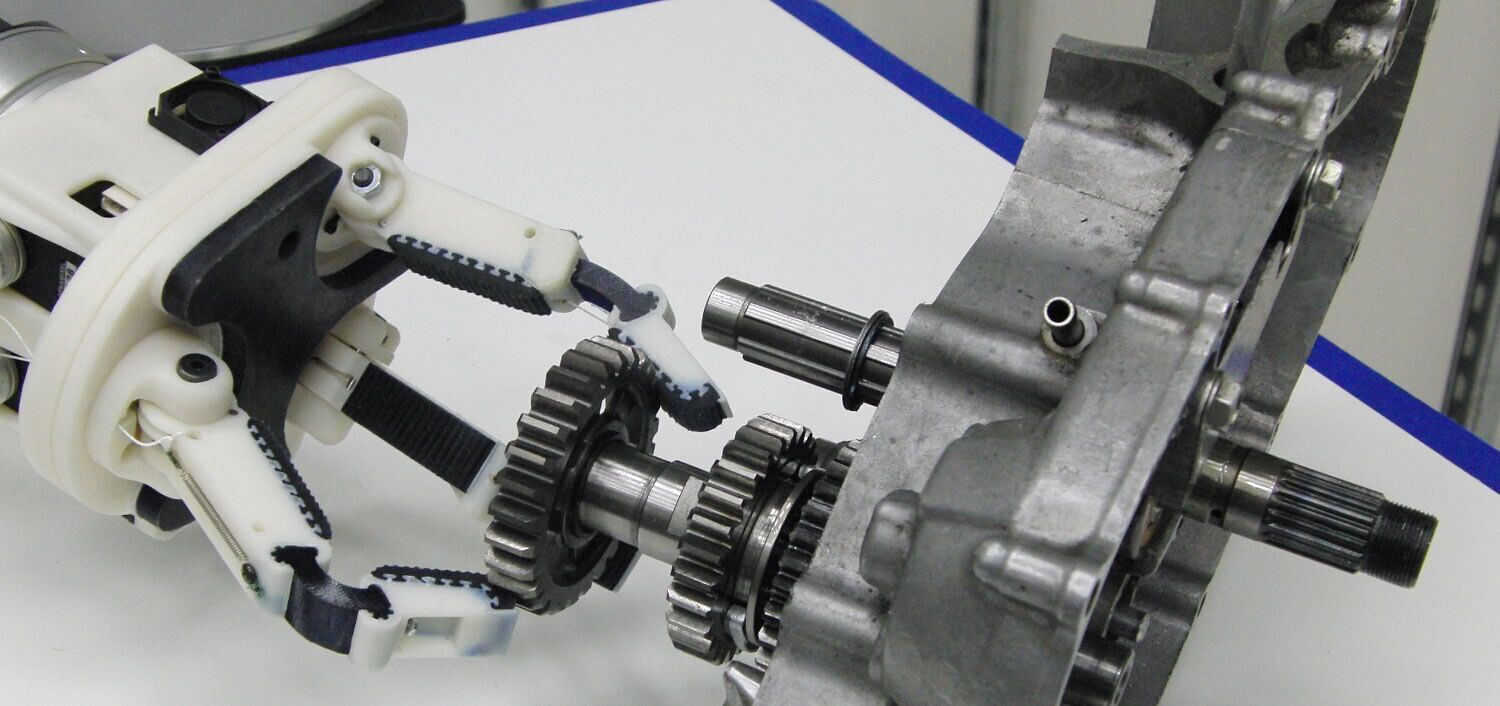
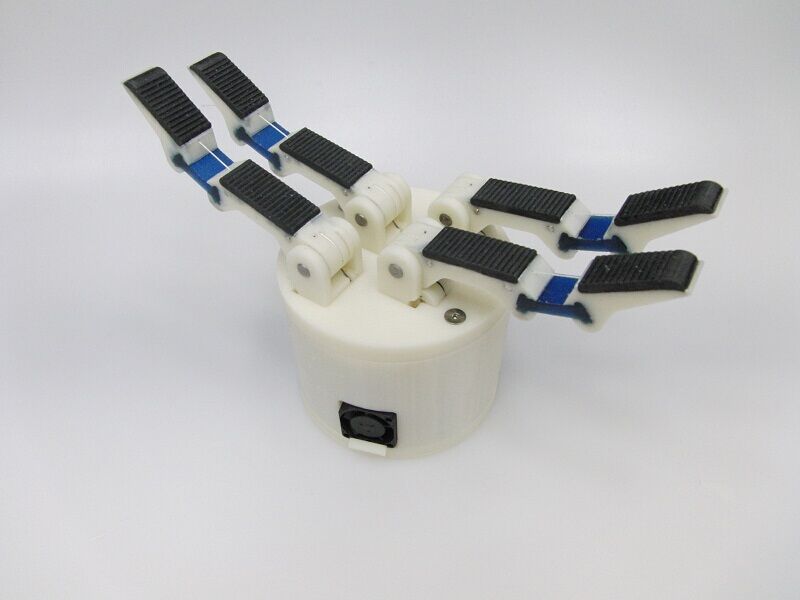
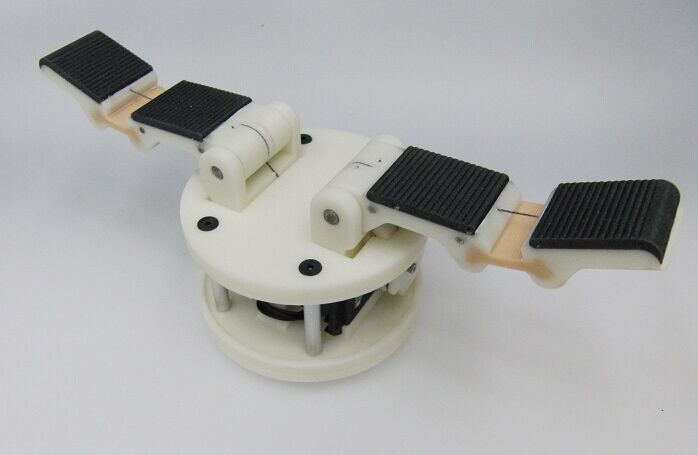
最终成型的手指强大且灵活,只需要极少的紧固件和其他功能部件。这些柔绳驱动的手指可以沿着物体的周围自然地蜷缩,并像真人的手那样均匀地分配力量。使用手上的指垫还可轻松拿起扁平的小物件,比如硬币。
项目组把这些柔绳驱动手指的开源软件和CAD文件设计为允许进行变量修改设置,创客们将可根据自己的需要调整这个机器人手设计,打印出不同参数的相关部件。
目前,该项目团队已经把相关文件上传至网上,有兴趣的创客们可去耶鲁大学官网下载相关文件。当然,创客联盟的小编也为大家备好了梯子:http://www.eng.yale.edu/grablab/openhand/index.html#about
图为研究人员开发的基于同一机械原理的四种不同的端部执行器:



© 2014-2020 东莞市创客联盟网络科技有限公司
粤ICP备15069436号
粤ICP备15069436号

